Montar y manejar un sistema de rescate basado en componentes

No todos los equipos de rescate con cuerdas pueden acceder al lugar del rescate con vehículo, como pueden hacer los bomberos o los equipos industriales. Los equipos de rescate con cuerdas en el interior del país, como los de rescate en montaña o los de búsqueda y rescate, suelen tener que transportar el equipo que necesitan a sus espaldas o desde un almacén de material estratégicamente situado. Estos equipos suelen buscar material más ligero para llevar a cabo el rescate.
Hace unos años, Emergency Management B.C. quería actualizar su programa de rescate con cuerdas para sus equipos de búsqueda y rescate. Gracias a una subvención, trabajaron con Base Camp Innovations, de Invermere (Columbia Británica), para probar una serie de sistemas y equipos de rescate con cuerdas.
De estas pruebas surgió ¨el concepto de sistemas de rescate con cuerda con limitación de fuerza¨. Las pruebas revelaron que, en el peor de los casos, las caídas producían fuerzas de entre 6 y 12 kN. Se aplicó un factor de ingeniería para la limitación de la fuerza, tras lo cual se propuso que si el sistema de cuerdas estaba preparado para 20kN+, sería capaz de soportar con creces una caída de 12 kN en el peor de los casos.
La segunda advertencia era que el sistema debía seguir funcionando después de la caída. EMBC y Base Camp Innovations probaron una serie de configuraciones y dispositivos diferentes, como las placas de aseguramiento ATC, el Scrab y los Rack. Tanto las placas de aseguramiento como el Scrab siguieron siendo funcionales después de las pruebas de caída, mientras que el descensor Racko sufrió cierta distorsión en la estructura.
A partir de estas pruebas, se llegó a la conclusión de que si un Scrab/ATC se instalara lejos del anclaje y un prusik entre el anclaje y las placas de aseguramiento/scrab, este sistema podría soportar la peor caída de los ejemplos y seguir siendo totalmente funcional. También se concluyó que este sistema funciona con cuerda estática de 11 mm.
Esta investigación proporcionó a los equipos SAR la opción de llevar un equipo más ligero cuando tuvieran que acceder a lugares de rescate remotos por sus propios medios.
¿Quiere ver el informe original? Acceda a él aquí.



Dispositivos de Control de Descenso de izquierda a derecha Scrab, ATC (en este caso el reverso 4 de Petzl y el Descensor Rack de Petzl.
Equipo necesario:
- Bucle de extensión de 60 cm con capacidad de 20kN o más
- Prusik de 8mm
- Un Dispositivo de Control de Descenso (DCD) como un Scrab o ATC
- Mosquetones
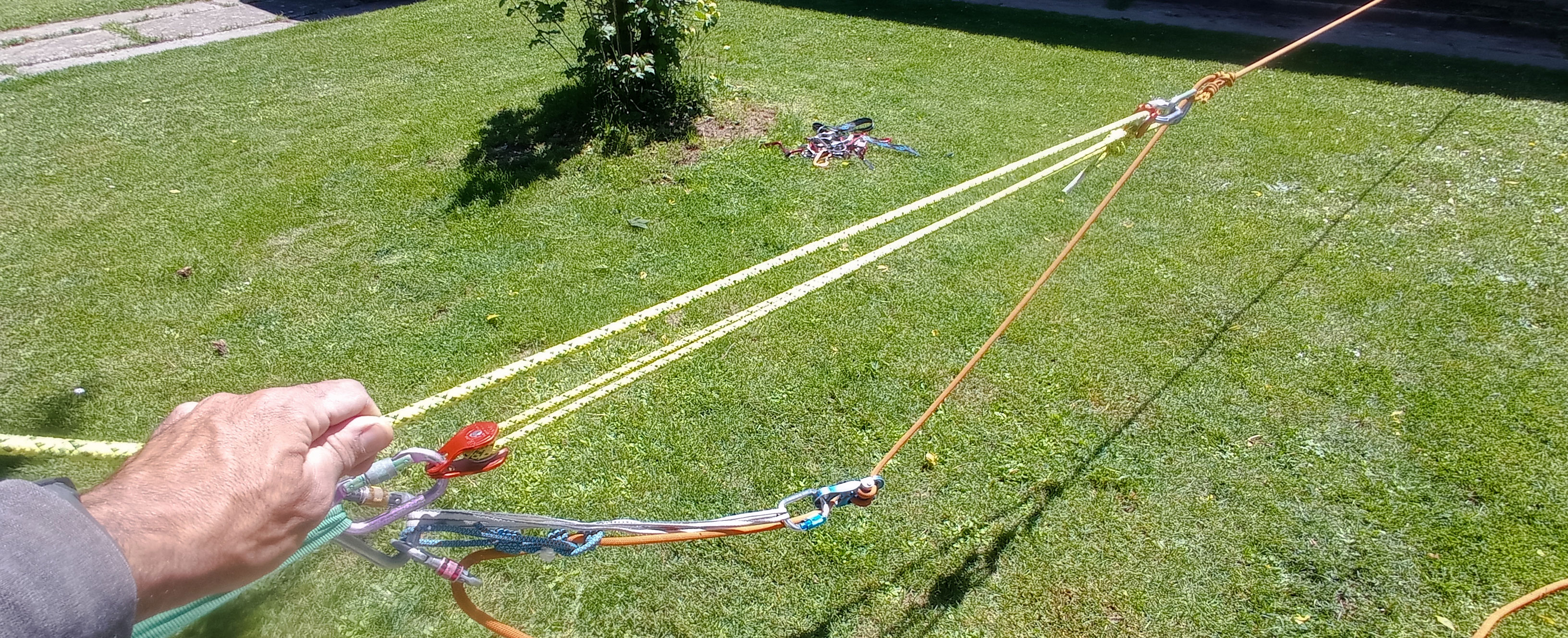
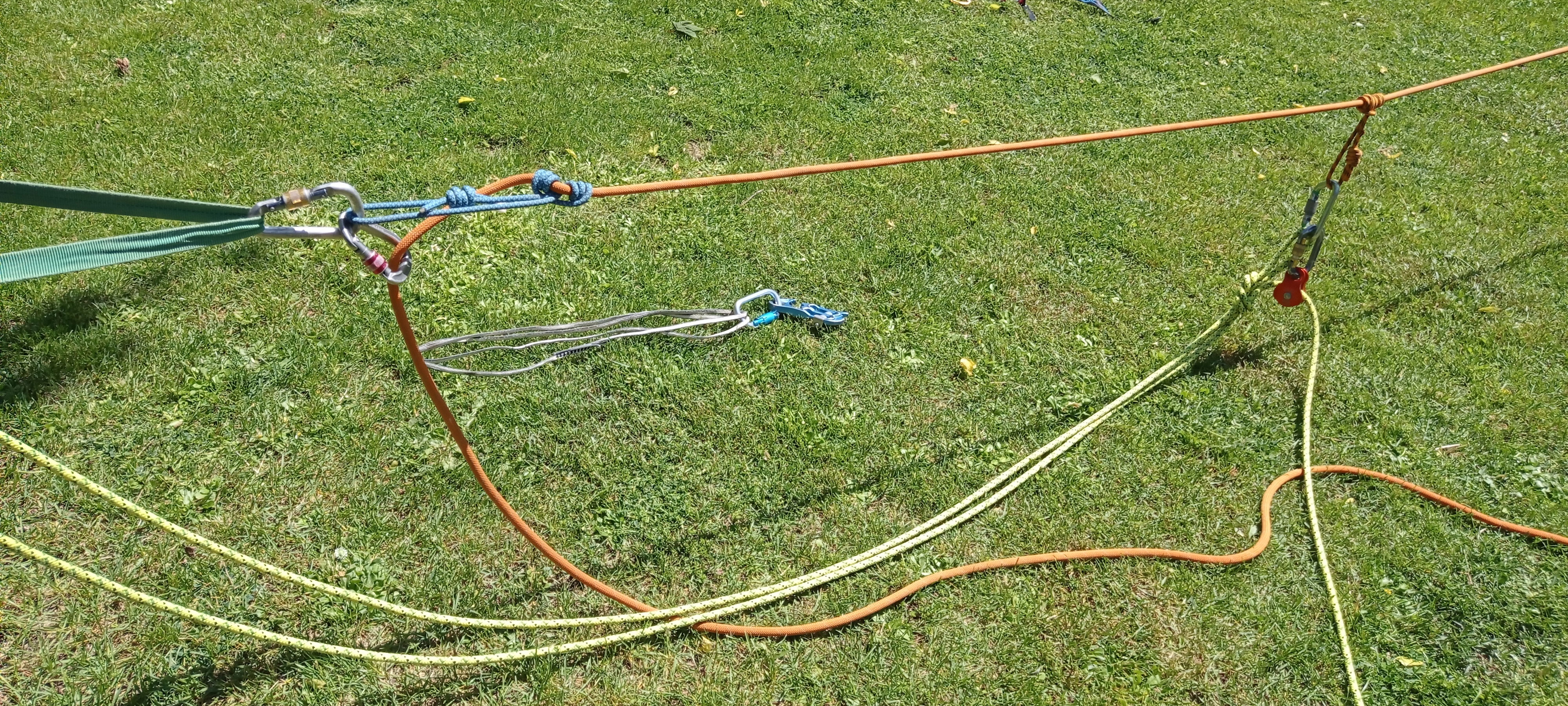
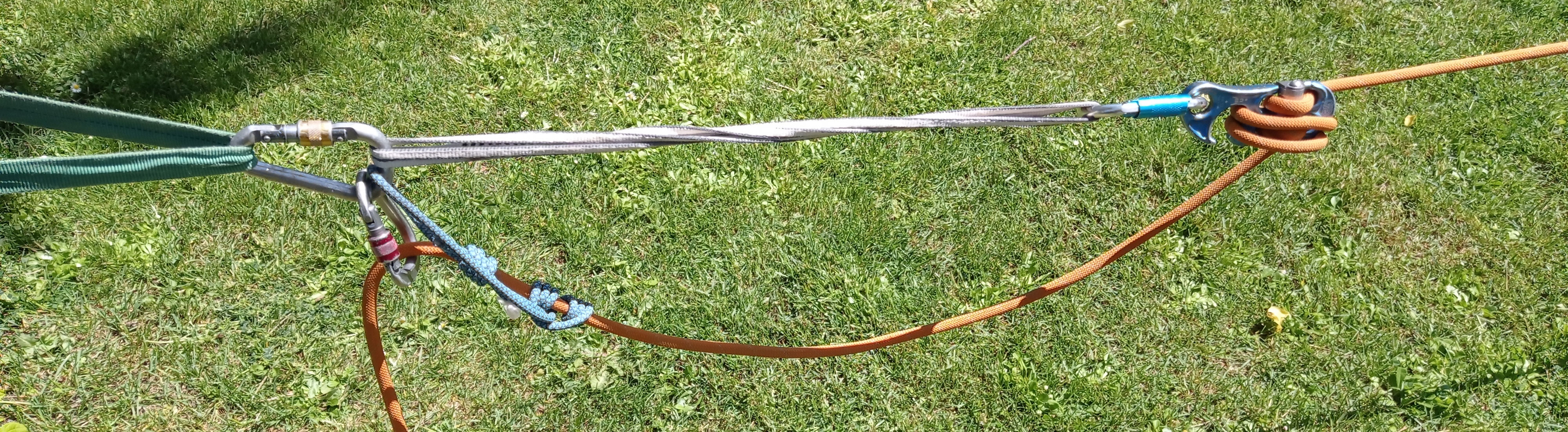
COMO CONSTRUIR EL SISTEMA DE ASCENSO Y DESCENSO DE CARGAS
Monta un anclaje adecuado para un sistema que se encargará de descender por una ladera o talud a una persona acompañada. En este caso hemos usado un W2P1 pero si hay dudas puede usarse un W3P2. Fuera del anclaje, conecta un bucle de extensión con una resistencia de al menos 20kN. En el extremo del bucle de extensión, conecta el DCD. Pasa la línea o cuerda de rescate por el DCD. Entre el anclaje y el DCD, instala el prusik de 8mm.

La maniobra se realiza con el hidrobot de Kong pero se pueden poner otros DCD como scarab o reverso. Hay que tener en cuenta la carga que vamos a manejar para pasar la cuerda una o dos veces y activar o no los bucles extra que lleva en este caso nuestro DCD.

FUNCIONAMIENTO DEL SISTEMA PARA DESCENSO
Para cargas ligeras, el sistema lo manejará una persona.
Para cargas más pesadas, cargas de 2 personas, será necesario manejarlocon 2 manos, una mano se encarga del prusik mientras la otra mano está en el cabo final de la cuerda.
Durante el maejo, con carga de una o dos personas, será necesario que un miembro del equipo actue como "respaldo" para ambas cuerdas a la vez, con el objetivo de proporcionar redundancia en caso de un fallo humano.
CAMBIO. PREPARAR EL SISTEMA PARA ASCENDER
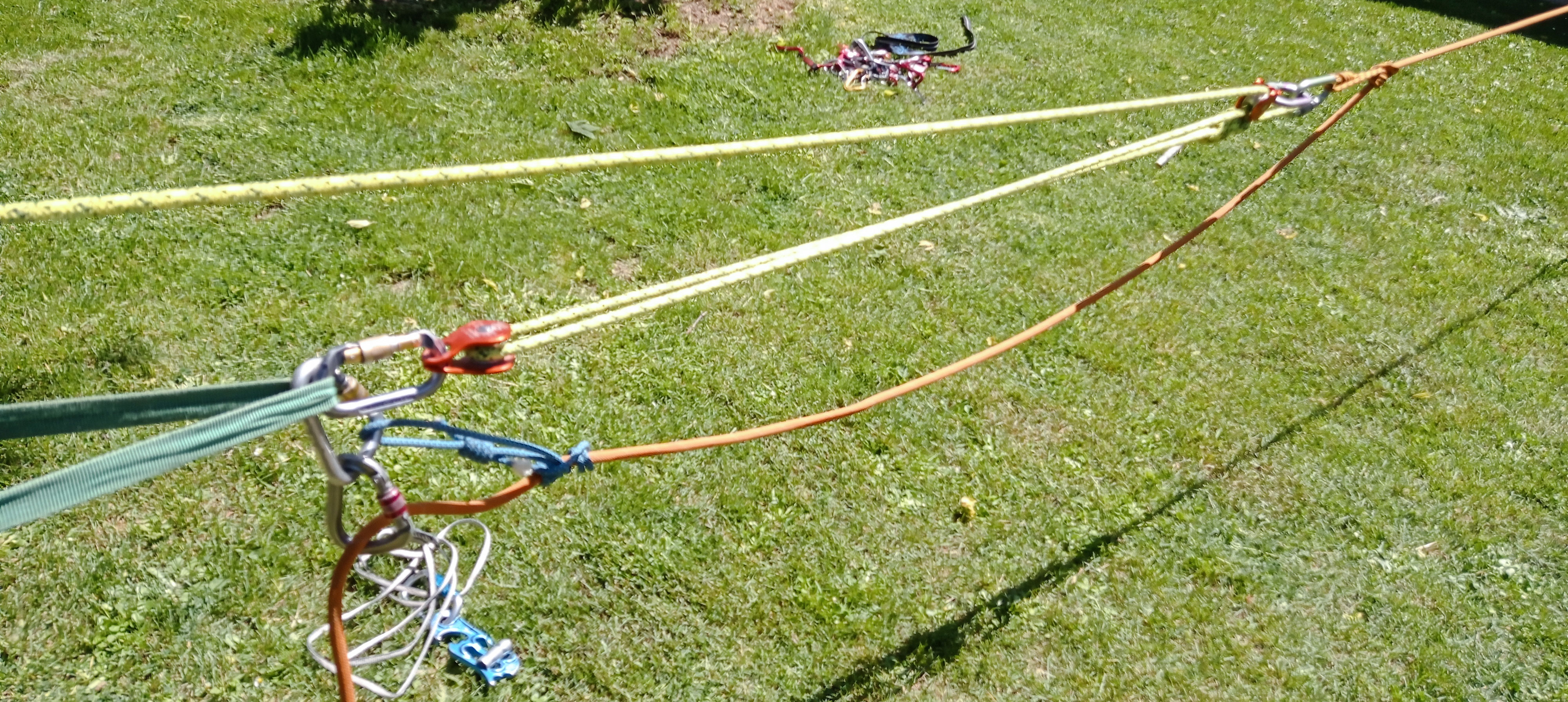
El cambio para comenzar a ascender se puede realizar anclando un sistema externo más allá del DCD.

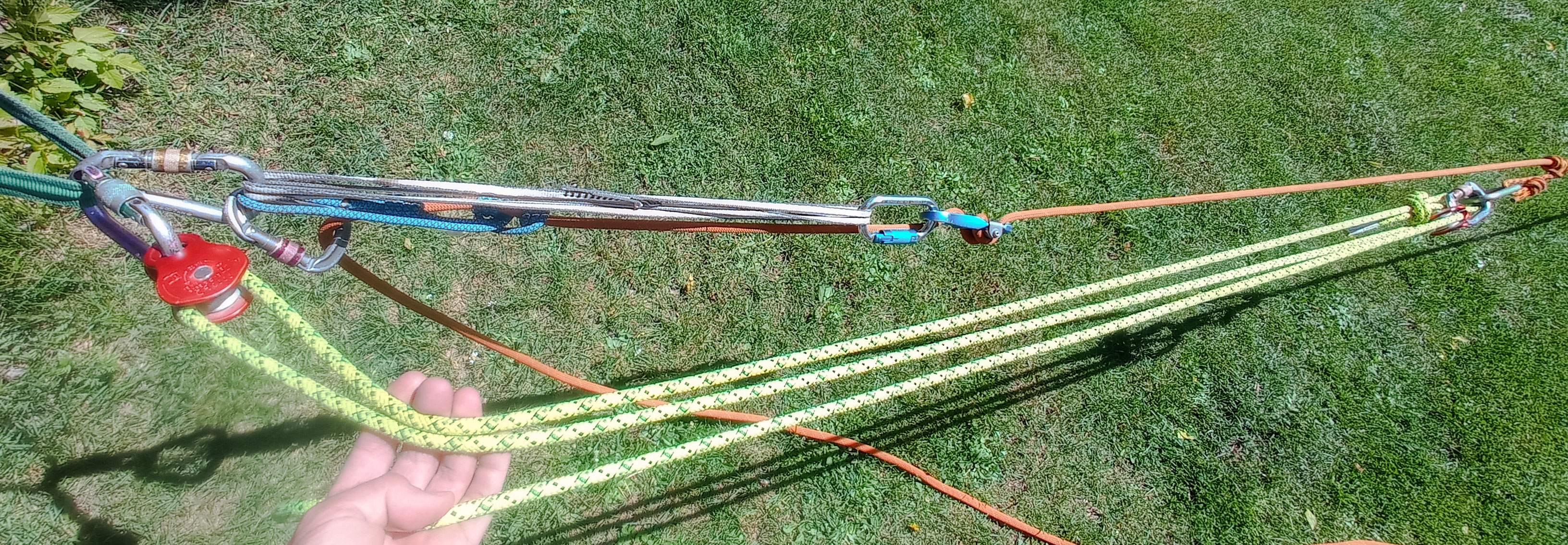
Como se ve en la imagen de abajo, se ha utilizado un polispasto 3:1 con cuerda externa con idea de quitar tensión al hidrobot, y así poder sacarlo.
.
Si damos cuerda al sistema externo 3:1, la carga de la cuerda pasará al prusik que hace de freno. Una vez que el Hidrobot se vea liberado de la carga podemos extraerlo.
Es recomendable dejar el prusik en la cuerda de carga (prusik azul), de esta manera tnemos un freno en la cuerda de carga, mientras alzamos la carga con el sistema de ventaja mecánica. El otro prusik que nos ha servido para conectar el sistema de ventaja mecánica externa (prusik naranja) nos servira en un futuro.

A continuación, se puede construir un sencillo sistema de ventaja mecánica 3:1 para elevar la carga con la misma cuerda dde carga.

CAMBIO: PREPARAMOS EL SISTEMA PARA DESCENSO
Si queremos volver a bajar la carga debemos desmontar el sistema 3:1 e insertar el hidrobot. A nivel técnico tendremos un problema a salvar. La cuerda de carga tiene tensión por lo que nuevamente necesitaremos un sistema externo que quite tensión a la cuerda de carga. Ponemos el proceso en una serie de fotos.
Lo primero insertamos el 3 a 1 para quitar tensión a la cuerda de carga y deshacemos el polipasto 3:1 que teníamos en la cuerda de carga.
A continuación conectamos un DCD (en nuestro caso el hidrobot) para que haga de freno. Lo alargamos con un bucle de extensión y nos aseguramos de que el prusik que tenemos en la cuerda principal (pruski azul) nos sirva de freno de emergencia.

Por último damos cuerda en la ventaja mecánica externa hasta que el freno DCD (hidroot en nuestro caso) coja tensión y sujete la carga.
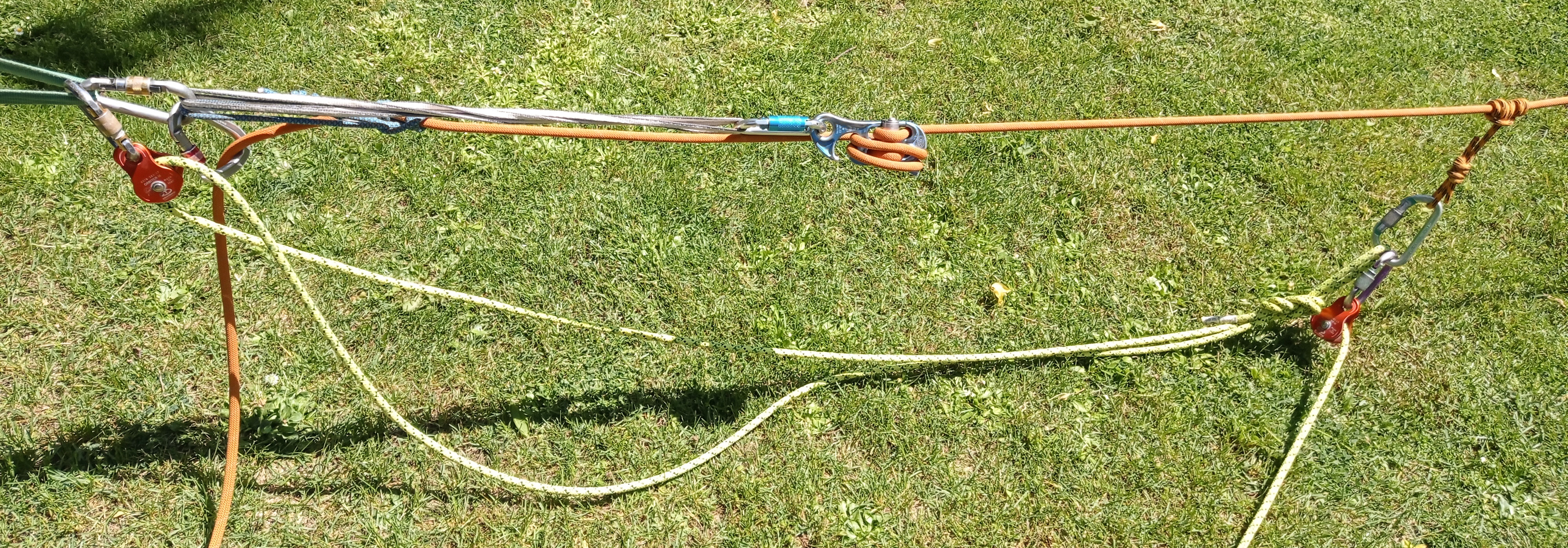
En este momento podemos quitar el polipasto externo para poder comenzar a descender de nuevo a la carga.
Artículo basado en las tecnicas de rescate desarrolladas por Rescue 3 International y Raven Rescue.
¿Interesado en aprender más sobre este tipo de sistema? Únase a nosotros en nuestro próximo curso de rescate técnico con cuerdas: nuestros instructores de cuerdas estarán encantados de responder a cualquiera de sus preguntas de rescate técnico y pueden ayudarlo a evaluar la mejor manera de abordar sus necesidades únicas de equipo de rescate?